Process automation with the Hermle C 20 U and the SherpaLoader® M25
The reduction of manual intervention plays a central role in the economic use of 5-axis machining centers. In the solution implemented here, the SherpaLoader® M25 automates continuous workpiece handling on a Hermle C 20 U. The processes from the raw part pick-up to the finished part deposit are coordinated and enable a uniform component feed with constant clamping quality. The combination of camera-based component recognition, automated clamping device operation and controlled cleaning sequence forms the basis for a stable, robot-supported production process.
Integrated safety functions for automatic operation
The robot cell is equipped with comprehensive safety devices to ensure the safe implementation of the automated process. A safely monitored light curtain on the loading side with a resolution of 30 mm prevents people from accidentally reaching into the safety area. There is also a monitored hinged door at the rear. In combination with continuous adjustment of the Robot Positions and speed, safe operation is guaranteed at all times and tampering, crawling under or reaching over during operation is safely prevented. The safety devices enable an uninterrupted, reliably safe process.
Robot-assisted CNC machining on a Hermle C 20 U
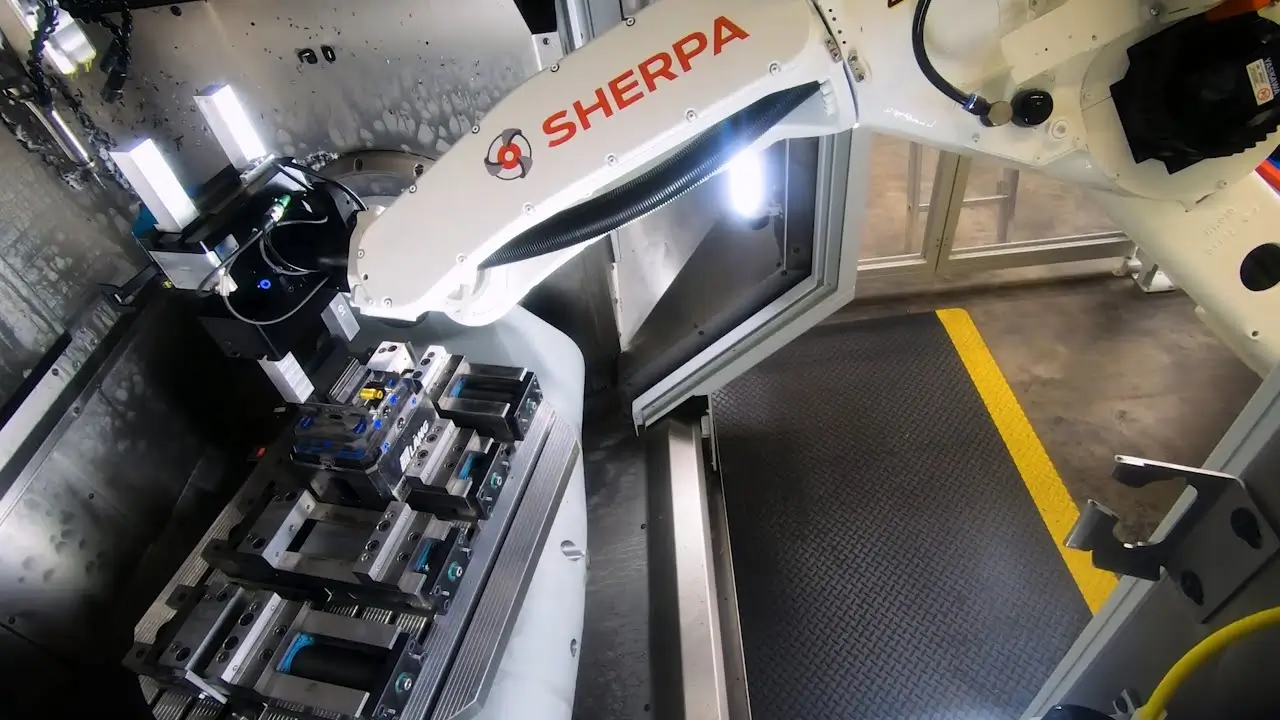
The material is supplied via a SpaceBox. This is automated by the robot and opened using a pull-out hook on the robot gripper. A camera-based recognition system then detects the positions of the raw parts in the Raw Material Staging, so that the SherpaLoader® M25 is able to grip them safely and in the correct position. The automatic detection of the raw parts reduces the requirements for manual loading of the Raw Material Staging and enables uncomplicated adaptation of the automation to changing workpiece geometries and production conditions. The robot arm is equipped with two two-jaw parallel grippers. It clamps the first blank with the blank gripper and positions it on an alignment station against a mechanical stop. The defined pre-alignment reduces clamping errors, ensures repeatable clamping in the machine vice and supports the reproducibility of the machining quality. After automated alignment of the Orientation of Blanks, the SherpaLoader® M25 transfers it to the work area of the Hermle C 20 U. Before the Part is inserted, the vice is automatically cleaned to remove chip or cooling lubricant residues. This improves the clamping conditions, reduces wear on the clamping technology and avoids potential faults in the machining process. The robot then inserts the blank into the machine vice. The SherpaLoader® M25 has an integrated torque wrench that allows the robot to close the mechanical vice with a defined torque and angle of rotation. During machining, the next raw part is already being prepared during machining. The implementation of synchronous processes reduces machine downtimes and maximizes the spindle running time. After the machining process, the robot arm cleans the finished part to remove build-up such as chips or cooling lubricant. The SherpaLoader® M25 then opens the vice with the Torque wrench and removes the finished part with the finished part gripper. The vice is automatically cleaned again before the next raw part is inserted and clamped. The finished parts are returned to the Raw Material Staging. The standardized cleaning and transfer supports consistent machining quality and simplifies machine maintenance.
Efficient automation of the Hermle C 20 U with the SherpaLoader® M25
The automated transfer to the Hermle C 20 U by the SherpaLoader® M25 creates reproducible conditions for the entire machining process. The combination of defined workpiece recognition, precise pre-alignment and automated vice operation reduces the influence of manual intervention. Robot-supported CNC Machining therefore takes place under constant clamping and transfer conditions, which improves the dimensional accuracy of the parts and minimizes the reject rate. At the same time, automation enables continuous utilization of the machine with minimal personnel requirements. This increases efficiency in series production and supports the economically plannable use of existing resources.