通过自动化优化生产 DMG Mori DMU 60eVo 配合 SherpaLoader® M25
切削加工过程的自动化可最大限度减少人工干预的数量,并提高过程安全性和工件质量。本视频展示了如何通过使用一台 SherpaLoader® M25 进行自动化来扩展 DMG Mori DMU 60eVo 五轴加工中心的生产工艺。
自动化切削加工 借助物料存储和 DMG Mori DMU 60eVo
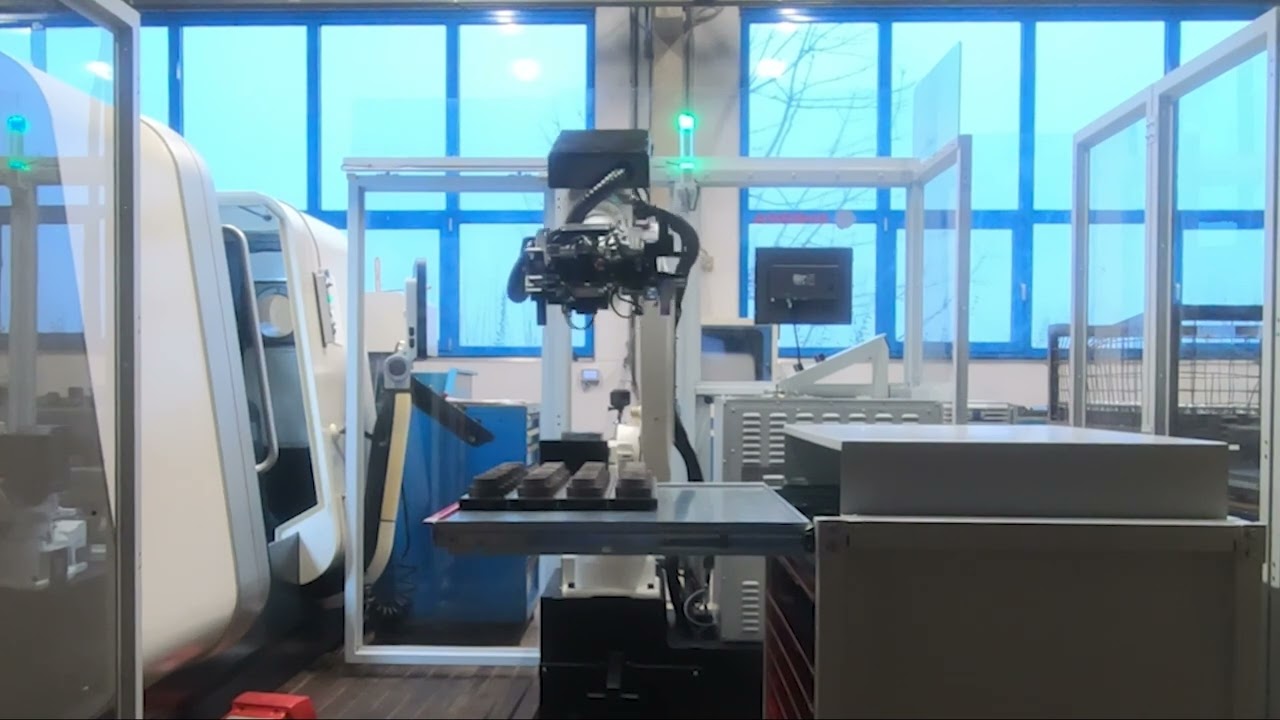
该生产工艺由一台带圆形门的 DMG Mori DMU 60eVo 五轴加工中心、一台 SherpaLoader® M25 和一个物料存储组成。此外,该生产配备了满足最高标准的全面安全方案。工作区由一道光幕和一道滑动门保护。物料准备通过 Spacebox 进行,毛坯在其中以矩阵板排列。如此最大限度减少了物料存储中的位置偏差,上料机器人可以根据矩阵取出毛坯。由此确保了 DMG Mori DMU 60eVo 的恒定物料流和最大机床利用率。SherpaLoader® M25 配有一个钩子,用它自动操作 SpaceBox 的抽屉。拉出一个抽屉后,机器人抓取第一个毛坯,并在加工机床中夹紧之前将其放置在定位板上。由此带来了高客户满意度。
优化的夹持 在 DMG Mori DMU 60eVo 中通过清洁和扭矩扳手
对齐后,机器人手臂将毛坯定位在 DMG Mori DMU 60eVo 加工中心中。上料机器人安装在一个倾斜 30° 的底座上,以提高在 DMG Mori DMU 60eVo 中的可达性。SherpaLoader® M25 在切削加工过程中的多样化集成可能性,允许对不同生产进行灵活的自动化。在将毛坯夹入 DMG Mori DMU 60eVo 的虎钳之前,机器人手臂用压缩空气清洁虎钳的夹爪,以清除切屑和冷却润滑液残留。通过自动化清洁,提高了夹持的可重复精度,从而提高了工件质量。此外,减少了因污染导致的设备磨损,从而减少了维护工作量。毛坯在虎钳中的夹紧同样自动进行。为此,夹持臂配备了一把 Allmatic 的扭矩扳手。借助 Robobuddy,机器人可以以确定的扭矩将毛坯夹紧在虎钳中。各个工艺步骤的自动化减少了人工干预并提高了过程安全性。由此确保了恒定的工件质量。此外,人员可用于其他工作。
同步的工艺步骤 实现 DMG Mori DMU 60eVo 主轴时间的最大化
在夹持臂离开 DMG Mori DMU 60eVo 的工作区后,圆形门自动关闭,切削加工过程开始。圆形门也由 MAFU-SHERPA CNC Automation 加装了驱动装置。如此可以用很少的投入进行工艺调整。在工件于 DMG Mori DMU 60eVo 中加工的同时,上料机器人已经在定位板上准备下一个毛坯。通过实施同步流程,减少了辅助时间并最大化了 DMG Mori DMU 60eVo 的利用率。这带来了生产经济效益的提高。切削加工过程结束后,自动化手臂用压缩空气清洁成品件并松开 DMG Mori DMU 60eVo 加工中心的虎钳。随后取出成品件,并再次用压缩空气清洁虎钳的夹爪。由于 SherpaLoader® M25 已经随身携带新毛坯,可以在清洁后直接将其放入 DMG Mori DMU 60eVo 并夹紧。下一个成品件被重新放回物料存储。