高效CNC加工,通过工艺自动化实现
在车床上对工件进行自动化切削加工,具有减少人工干预和提高工艺稳定性的潜力。在此展示的应用中,将Gildemeister CTX beta 1250 TC与SherpaLoader®T20相结合,以标准化重复的搬运步骤。目标是实现具有同步流程和最小化辅助时间的可重现生产流程。自动化为稳定一致的质量和更高的机床资源利用率创造了前提条件。
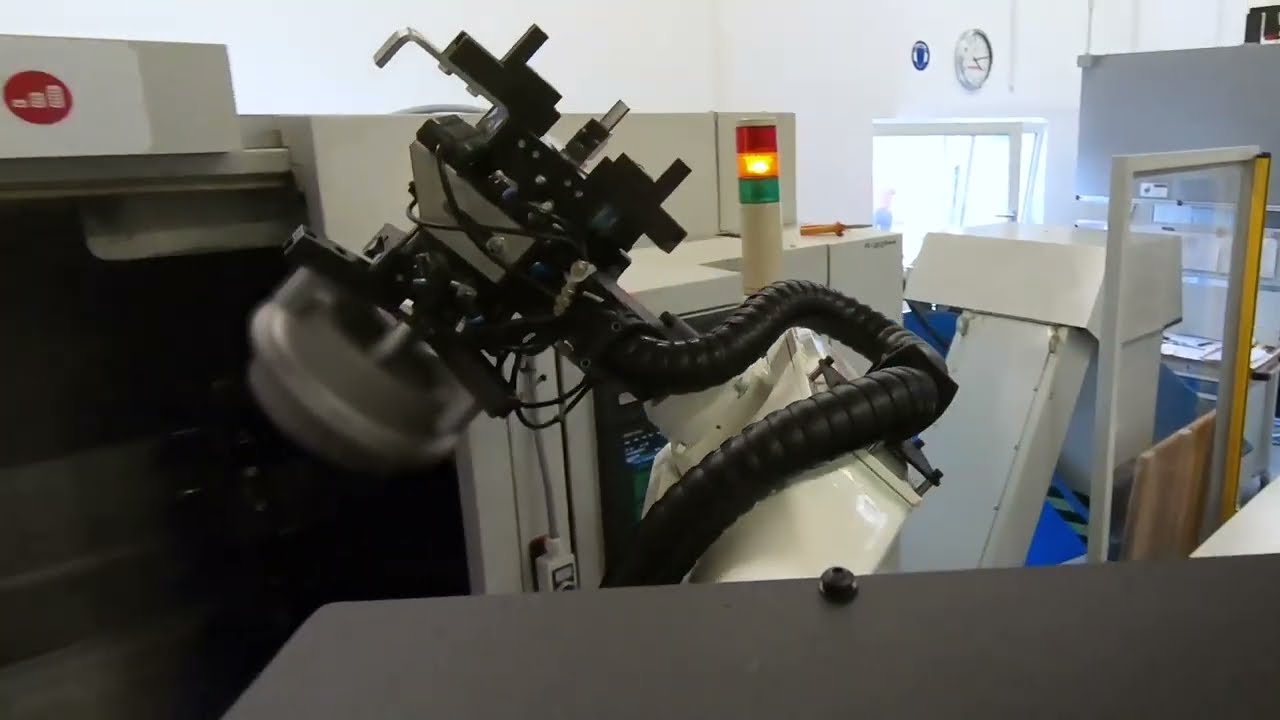
机器人引导工件搬运:Gildemeister CTX beta 1250 TC
物料准备通过台车进行。SherpaLoader®T20配有两个三爪定心夹爪,可借此安全地运送工件。首先,机器人识别物料存储上毛坯的位置。机器人用毛坯夹爪抓取第一个工件,并将其放置到对齐工位上。这种预定位减少了后续装夹过程中的位置偏差,并提高了整个加工流程的稳定性。对齐后,机械臂将工件自动送入Gildemeister CTX beta 1250 TC的主轴,从而取代了对加工机床的手动上料。这减少了人力投入,并有助于实现可重现的装夹位置。自动化交接的引入实现了均衡的节拍和标准化的工艺条件。在工件于主轴上被切削加工时,机器人已从物料存储处取走下一个毛坯。该毛坯同样被放置到对齐工位上,以便在加工完成后立即可用于下一个工序步骤。切削加工完成后,SherpaLoader®T20用成品件夹爪从副主轴取出已加工的工件。下一个毛坯随即被自动放入主轴的夹具中。这一流程将各工作节拍之间的辅助时间降至最低,并提高了有效的主轴运行时间。
安全装置,用于监控整个系统
为实现人与机器的安全协作,该单元配备了全面的防护装置。上料侧一道分辨率为30 mm的光幕可实现手部识别,并受到安全监控。此外,后侧一道安全监控的检修门以及对机器人位置和速度的持续监控,确保了在自动化环境中的安全运行。人员伸入、下钻或越界进入工作区域均得到有效防止。
自动化车削加工,助力可重现流程
机器人辅助工件搬运、同步流程与受控交接相结合,不仅减少了人工操作,还提升了CNC制造中的可重现性和工艺安全性。操作人员的负担得以减轻,可用于工艺监控、检验任务或换型准备等更高层次的任务。由此,在Gildemeister CTX beta 1250 TC上采用SherpaLoader®T20的自动化,有助于实现稳定的节拍时间、恒定的工件质量以及对可用资源的高效利用。