机器人辅助物料搬运与 HURCO VMX 30i 配合 SherpaLoader® M25 的精密过程控制
切削加工过程的机器人自动化在制造业中日益重要。SherpaLoader® M25 与 HURCO VMX 30i 三轴加工机床配合,承担物料搬运、毛坯定位以及送入机床等重复性任务,从而形成标准化流程。同时,该机器人可集成基于摄像头的识别系统、精确对齐和同步的工艺步骤,持续支持生产流程。
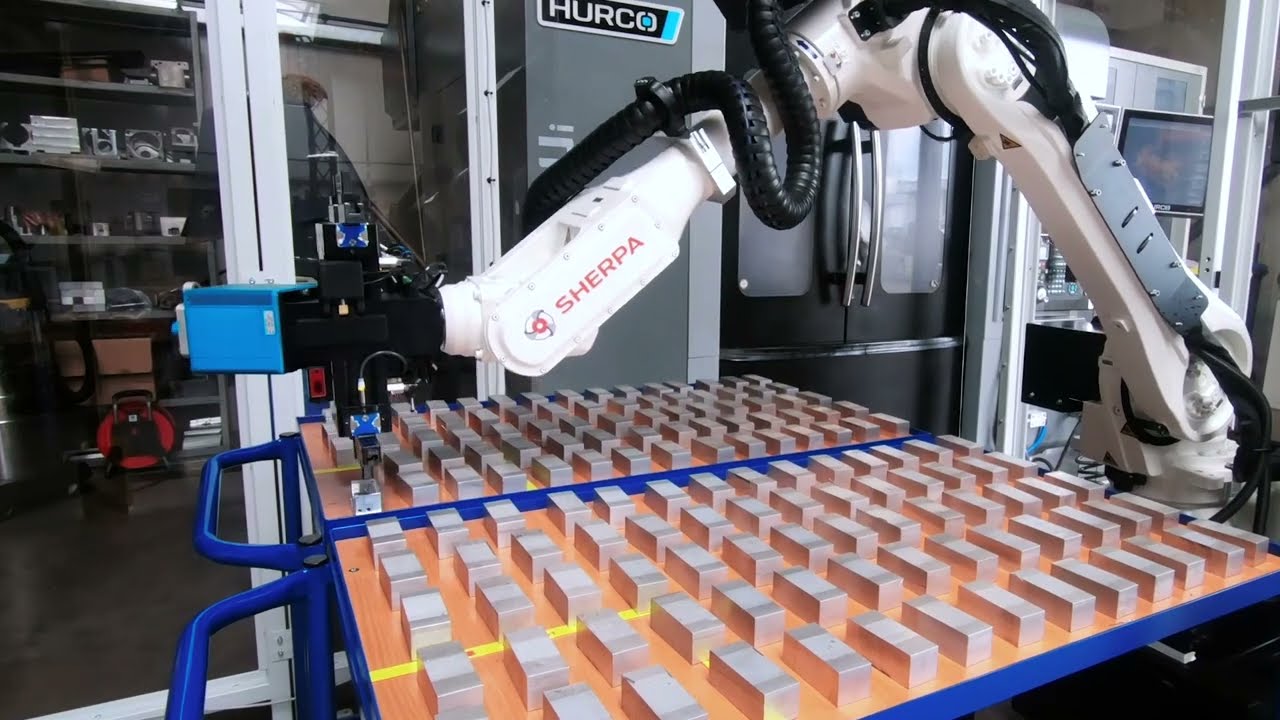
物料准备与 SherpaLoader® M25 在 HURCO VMX 30i 上的摄像头零件识别
切削加工自动化的基础是智能物料准备。毛坯通过带有多个抽屉的 Spacebox 提供。SherpaLoader® M25 自动打开 Spacebox 的抽屉,并通过基于摄像头的识别系统采集毛坯的位置。基于摄像头的识别可靠地识别工件,即使位置不断变化,也能在无需人工检查的情况下实现安全取件。这降低了误抓取的风险并提高了过程稳定性。机器人配备两个两爪夹爪,确保工件的安全稳定运输。机器人手臂用毛坯夹爪从物料存储中抓取第一个毛坯,并将其放置在对齐工位上。摄像头采集与精确抓取的结合确保了可重复精度的搬运,并最大限度减少运输损伤。
精确对齐与夹紧 使用 SherpaLoader® M25 在 HURCO VMX 30i 上
在对齐工位上,SherpaLoader® M25 将毛坯顶靠在机械挡块上。这种精确的预定位确保工件在送入 HURCO VMX 30i 的虎钳之前以可重复精度对齐。自动夹紧减少了人工干预,提高了过程安全性并确保稳定的工件质量。通过精确对齐,可最大限度减少加工过程中的修正,从而支持生产稳定性。对齐后,机器人将工件送入 HURCO VMX 30i 的工作区。
同步流程与连续物料流,借助 SherpaLoader® M25 在 HURCO VMX 30i 上
在 HURCO VMX 30i 切削当前工件的同时,SherpaLoader® M25 已在对齐工位上对齐下一个毛坯。加工完成后,机器人用成品件夹爪取出成品件,并将已随身携带的新毛坯放入虎钳。随后机器人手臂将成品件重新放回物料存储。这些同步流程减少了辅助时间,优化了机床利用率,并确保持续的高生产率。下一个毛坯的并行准备支持连续的物料流并提高主轴运行时间。
最大化经济效益与 HURCO VMX 30i 配合 SherpaLoader® M25 的过程安全性
使用 SherpaLoader® M25 对 HURCO VMX 30i 进行自动化,通过稳定的流程提高了经济效益,并减少了人力投入。基于摄像头的采集、精确对齐和同步工艺步骤提高了可重复精度并确保过程稳定性。同时,自动化减轻了操作人员的负担,因为物料搬运或夹紧等人工操作得以省去。为确保自动化生产的安全运行,已安装防止干预、下钻和越界的安全装置,以及光栅和带接近传感器的门,用于监控工作区并防止干预。由此在确保安全运行的同时实现了高生产率。