機器人輔助物料搬運 與 HURCO VMX 30i 搭配 SherpaLoader® M25 的精確製程控制
使用機器人實現切削加工製程的自動化在製造業中日益重要。SherpaLoader® M25 與 HURCO VMX 30i 三軸加工機床結合,承擔物料搬運、毛坯定位以及送入機床等重複性任務,從而形成標準化的作業流程。同時,機器人能夠整合攝像頭式識別系統、精確對齊與同步化的製程步驟,持續支援生產流程。
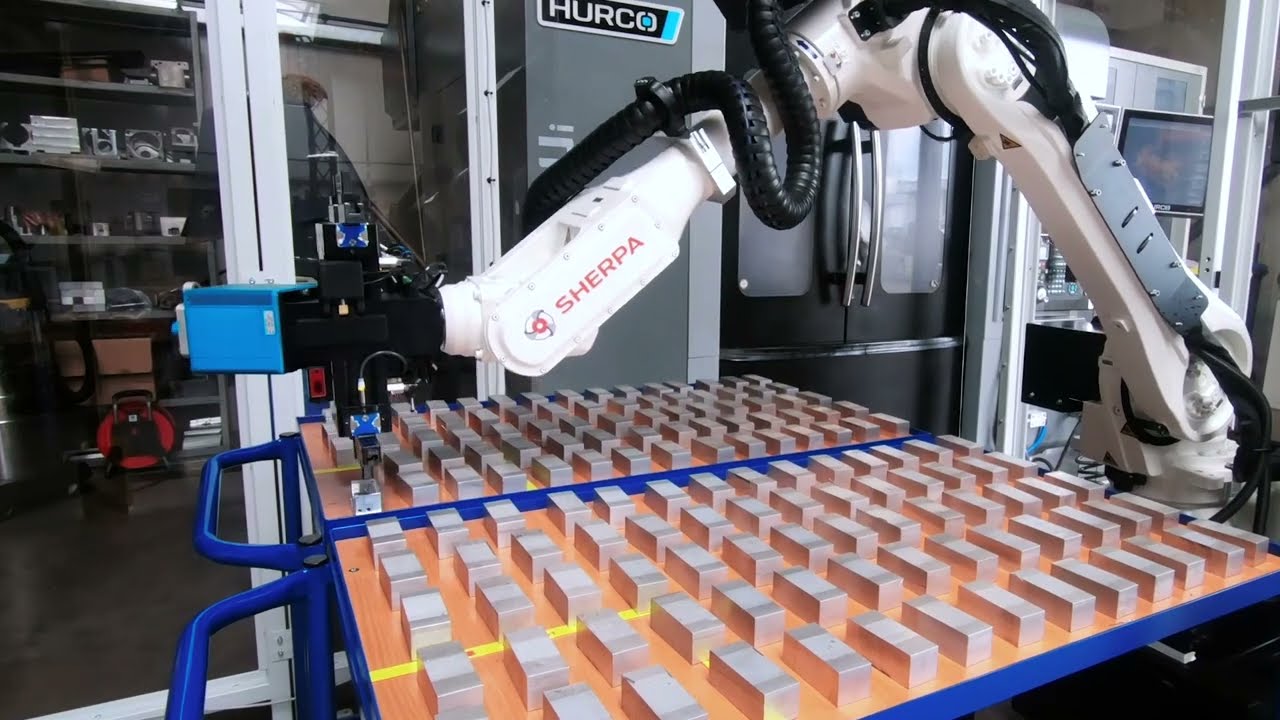
物料準備 以及 SherpaLoader® M25 在 HURCO VMX 30i 上的攝像頭式零件識別
切削加工自動化的基礎在於智慧化的物料準備。毛坯透過具有多個抽屜的 Spacebox 提供。SherpaLoader® M25 會自動打開 Spacebox 的抽屜,並透過攝像頭式識別系統偵測毛坯的位置。攝像頭式識別能可靠地辨識工件,即使位置有所變化,也能在無需人工檢查的情況下安全取件。如此可降低誤抓的風險並提高製程穩定性。機器人配備兩個兩爪夾爪,確保工件安全且穩固地搬運。機器人手臂以毛坯夾爪從物料存儲中抓取第一個毛坯,並將其放置在對齊工位上。攝像頭式偵測與精確抓取的結合,確保了可重現的搬運並將運輸損傷降至最低。
精確對齊與夾持 由 SherpaLoader® M25 在 HURCO VMX 30i 上完成
在對齊工位上,SherpaLoader® M25 將毛坯抵靠在機械擋塊上。這種精確的預定位確保工件在送入 HURCO VMX 30i 的虎鉗之前已可重現地對齊。自動夾持減少了人工介入,提高了製程安全並確保了一致的工件品質。透過精確對齊,加工過程中的修正得以最小化,從而支援生產的穩定性。對齊完成後,機器人將工件送入 HURCO VMX 30i 的工作空間。
同步化作業 與 SherpaLoader® M25 在 HURCO VMX 30i 上的連續物流
當 HURCO VMX 30i 切削當前工件時,SherpaLoader® M25 已在對齊工位上對齊下一個毛坯。加工結束後,機器人以成品件夾爪取出成品件,並將已隨身攜帶的新毛坯放入虎鉗中。隨後,機器人手臂再將成品件放回物料存儲。這些同步化的作業減少了輔助時間、優化了機床利用率並確保持續穩定的高生產力。下一個毛坯的並行準備支援連續的物流,並提高主軸運行時間。
最大化經濟效益 以及 HURCO VMX 30i 搭配 SherpaLoader® M25 的製程安全
以 SherpaLoader® M25 對 HURCO VMX 30i 進行的自動化,透過穩定的作業流程提升經濟效益並減少人力投入。攝像頭式偵測、精確對齊與同步製程步驟提高了重複精度並確保製程穩定性。同時,自動化減輕了操作人員的負擔,因為諸如物料搬運或夾持等人工作業得以免除。為確保自動化生產的安全運行,已安裝防止介入、下方鑽入和越界伸入的安全裝置,以及光柵和帶有接近感測器的門,用以監控工作空間並防止介入。如此便能在確保安全運行的同時保證高生產力。