稳定可靠的五轴加工,在 DMG DMU 65 FD 上通过机器人辅助自动化实现
对现代 CNC 生产流程的要求在持续提高。为了实现始终如一的质量、高可重复性和经济效率,自动化加工方法必不可少。尤其在批量生产中,通过采用机器人辅助系统可以使流程稳定并可靠地标准化。与一台 DMG DMU 65 FD 五轴加工中心 相结合,SherpaLoader®M20 实现了这一自动化解决方案,并实现了一个减少人工干预且工艺可靠性高的结构化生产环境。
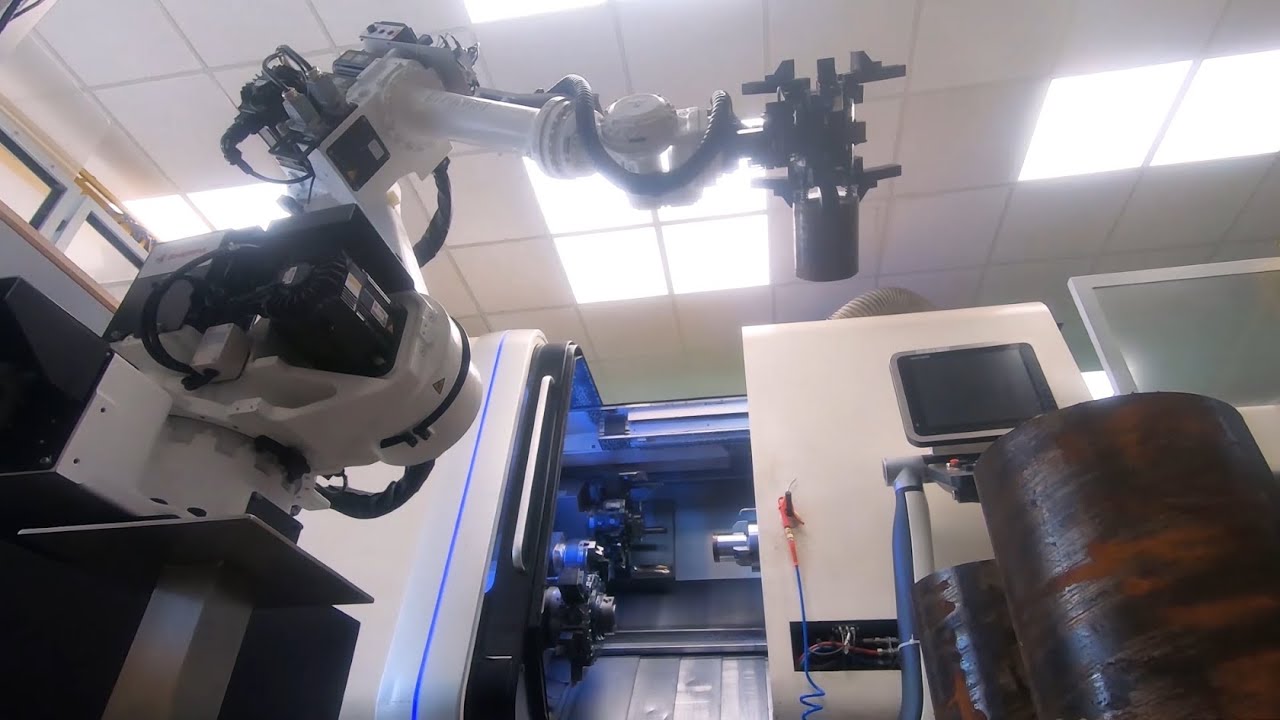
机器人辅助的 CNC 加工,在 DMG DMU 65 FD 上
POM 塑料件的物料准备通过一台 SpaceBox 完成,其抽屉由机器人自动打开。SherpaLoader®M20 用 摄像头识别系统 检测工件位置,从而实现不依赖位置的取件。由此,生产流程可以快速灵活地适应不同的几何形状和变化的工件位置,并降低了对在物料存储区上人工定位毛坯的要求。为此,机器人手臂配备两个两爪平行夹爪。机器人用毛坯夹爪从物料存储区取出第一个毛坯,并将其送至对齐工位。在对齐工位上,工件通过固定挡块进行对齐。这种预对齐补偿了位置偏差,并确保在后续加工阶段中实现高重复精度的装夹。无论工件之前的位置如何,放入加工位置的精度都得以保持。机器人将预定位的工件放入 DMG DMU 65 FD 的第一个机用虎钳中,并用集成的电动扭矩扳手夹紧机用虎钳。SherpaLoader®M20 通过扭矩扳手以明确的扭矩和转角夹紧机用虎钳,从而确保稳定的装夹条件和始终如一的工件质量。在切削加工进行的同时,下一个毛坯已被抓取并在对齐工位上做好准备。在自动化切削加工流程中实施同步流程,可减少辅助时间并 提高主轴运行时间。由此整个流程更加高效,并有助于提高 DMG DMU 65 FD 的经济利用率。
切削加工自动化,用于 DMG DMU 65 FB 上的工件双面加工
第一个加工步骤完成后,机器人自动清洁工件并将其从机用虎钳中取出。随后再次清洁机用虎钳的夹持位置,并放入下一个毛坯。对工件和装夹位置的清洁可确保稳定的装夹条件,并提高工艺可靠性和工件质量。SherpaLoader®M20 在重新夹持工位上翻转已加工的半成品,并在对齐工位上对其重新对齐。由此确保工件背面能够以始终如一的精度进行加工。机器人手臂将对齐后的半成品放入 DMG DMU 65 FD 的第二个机用虎钳中,该机用虎钳同样事先经过清洁。第二面的切削加工开始。加工后,两个机用虎钳都被打开,放入下一个毛坯,半成品被翻转后重新放入,成品件最后被清洁并重新放回物料存储区。在整个流程中,机器人的工作区始终可靠地受到保护:一扇进入门保障进入工作区的通道,一道光幕防护通往物料准备的入口区域。此外,机器人的工作区还配备了安全限界。这种组合确保了操作区与自动化区之间的清晰分隔,并始终安全运行。
自动化批量生产,搭配 DMG DMU 65 FD
将 SherpaLoader®M20 集成到 DMG DMU 65 FD 的切削加工流程中,将可重复的装夹过程与全程同步化的流程结合在一起。自动物料准备、摄像头工件检测、预定义对齐和受控机用虎钳夹紧的组合,能够在工件两面实现始终如一的加工结果。同时,人工干预减少,从而提高工艺稳定性并减轻操作人员的负担。整套系统支持在稳定条件下的 经济生产——尤其适用于对尺寸精度、重复精度和工件清洁度有高要求的适合批量的流程。