高效CNC加工透過流程自動化
在車床上對工件進行自動化切削加工,具有減少人工介入與提升製程穩定性的潛力。在此處展示的應用中,將一台 Gildemeister CTX beta 1250 TC 與一台 SherpaLoader®T20 結合,以標準化重複的搬運步驟。目標是實現具有同步流程與最小化輔助時間的可重現生產流程。自動化為穩定的品質與更高的機床資源利用率創造了前提條件。
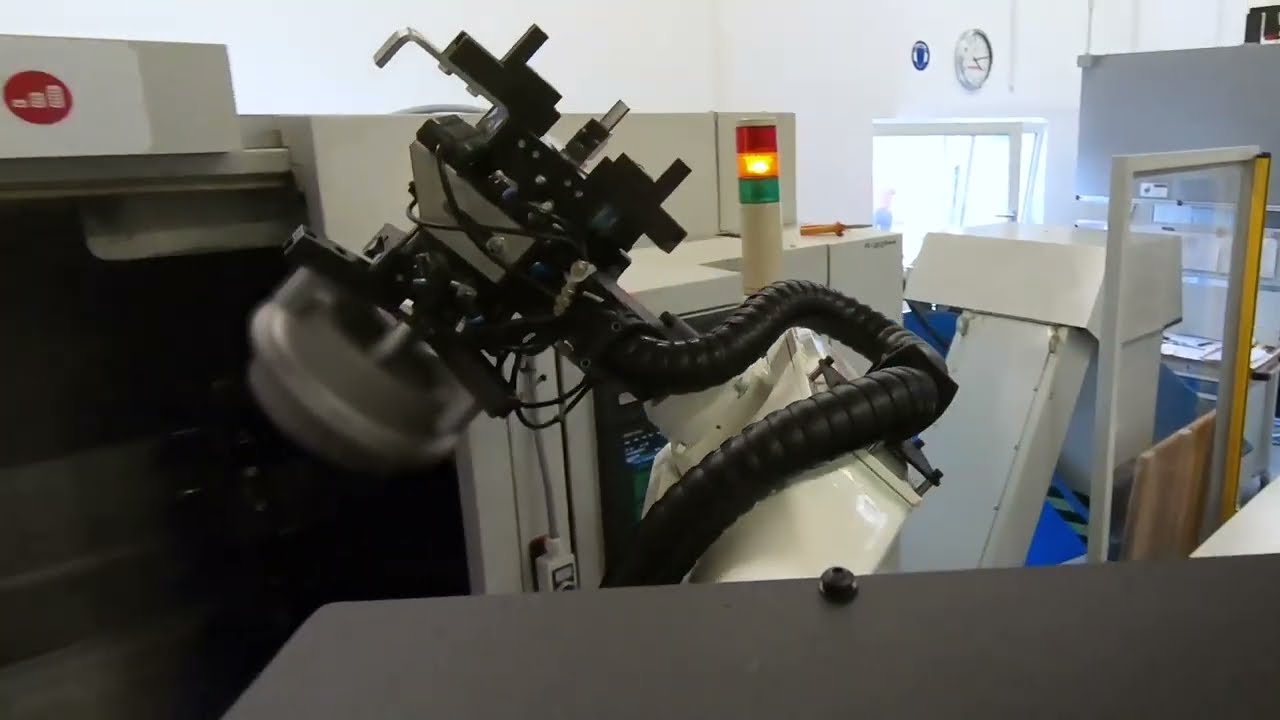
機器人引導的工件搬運於 Gildemeister CTX beta 1250 TC
物料準備透過台車進行。SherpaLoader®T20 配備兩個三爪定心夾爪,能夠安全地搬運工件。首先,機器人擷取物料存儲上毛坯的位置。機器人使用毛坯夾爪抓取第一個工件,並將其放置在對齊工位上。這種預定位減少了後續夾持流程中的位置偏差,並提升了整個加工流程的穩定性。對齊後,機器手臂將工件自動移交至 Gildemeister CTX beta 1250 TC 的主軸,取代了加工機床的手動裝填。這降低了人力工作量,並有助於可重現的夾持位置。自動化交接的整合實現了均勻的節拍與標準化的製程條件。當工件在主軸上被切削加工時,機器人已從物料存儲取出下一個毛坯。該毛坯同樣被放置在對齊工位上,以便在加工完成後立即為下一個製程步驟做好準備。切削流程完成後,SherpaLoader®T20 使用成品件夾爪從副主軸取出已加工的工件。下一個毛坯隨即被自動放入主軸的夾具中。此流程最小化了工作節拍之間的輔助時間,並提升了有效的主軸運行時間。
安全裝置用於監控整個系統
為了人與機器的安全協作,該單元配備了全面的防護裝置。上料側一道解析度為 30 mm 的光柵可實現手部偵測,並受到安全監控。此外,後側一道安全監控的檢修門以及對機器人位置與速度的持續監控,確保了在自動化環境中的安全運行。人員介入、下方鑽入或上方越界進入工作區域均被有效防止。
自動化車削加工為可重現的流程作出貢獻
機器人輔助的工件搬運、同步化的流程與受控的交接相結合,不僅減少了人工作業,還提升了 CNC 製造中的可重現性與製程可靠性。操作人員的負擔得以減輕,並能投入到製程監控、檢驗任務或換型準備等更高層次的任務。因此,在 Gildemeister CTX beta 1250 TC 上採用 SherpaLoader®T20 的自動化,有助於穩定的節拍時間、恆定的工件品質以及對可用資源的高效利用。