Automatizuotų procesų integravimas į CNC serijinę gamybą
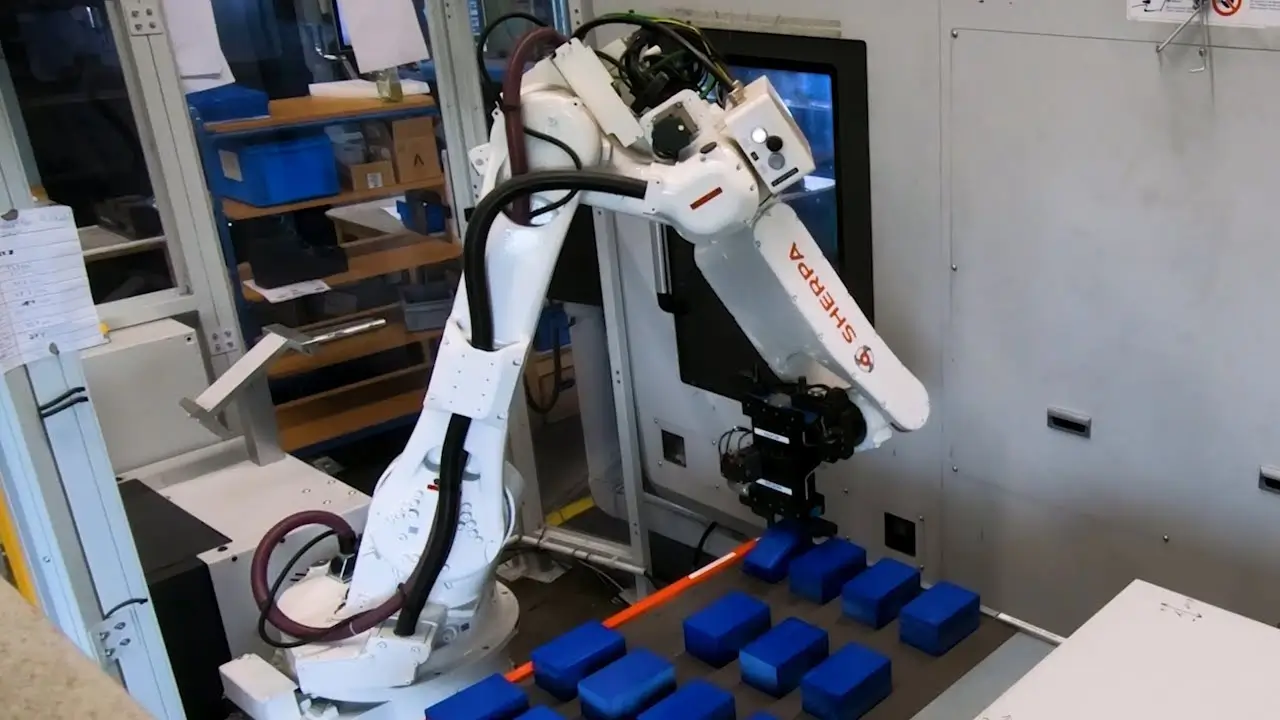
Automatizuotas CNC tekinimo staklių aprūpinimas detalėmis leidžia tolygiai apkrauti stakles esant pakartojamoms tvirtinimo sąlygoms. Kartu su kameros pagrindu veikiančia atpažinimo sistema, automatizuotu griebtuvo valymu ir mechaniniu išankstiniu lygiavimu SherpaLoader®T88 automatizuoja stabilią serijinę gamybą DN Solutions Puma GT3100 LM staklėse. Procesas sumažina rankines operacijas, mažina gamybos svyravimus pjovimo apdirbimo procese ir maksimaliai padidina suklio veikimo laiką.
Robotizuotas CNC apdirbimas DN Solutions Puma GT3100 LM staklėse
Medžiagų srautas šiame pjovimo apdirbimo procese yra padalintas į ruošinių paletę ir gatavų detalių paletę. Tai leidžia pateikti ruošinius taupant vietą juos sukraunant. SherpaLoader®T88 yra aprūpintas dviem trijų žiaunų centriniais griebtuvais, kad būtų užtikrintas saugus detalių transportavimas. Integruota kameros pagrindu veikiančia atpažinimo sistema roboto ranka užfiksuoja ruošinių padėtį ruošinių paletėje. Taip sumažinami rankinio paletės aprūpinimo reikalavimai, o pjovimo apdirbimo procesas gali būti minimaliomis pastangomis pritaikytas prie kintančių gamybos sąlygų. Valdomas kameros atpažinimo, robotas paima pirmą ruošinį ruošinių griebtuvu ir pozicionuoja jį lygiavimo stotyje. Šis mechaninis išankstinis lygiavimas užtikrina pakartojamą tikslų pozicionavimą ir užtikrina detalių tvirtinimo padėtį įrenginyje. Po lygiavimo ruošiniai perkeliami į DN Solutions Puma GT3100 LM griebtuvą. Prieš užtvirtinant ruošinį, robotas automatiškai suspaustu oru išvalo griebtuvą. Ši priemonė pašalina drožlių ir aušinimo skysčio likučius nuo tvirtinimo paviršių ir užtikrina pastovias tvirtinimo sąlygas. Taip užtikrinama pastovi detalių kokybė ir sumažinamos tvirtinimo priemonių priežiūros sąnaudos. Po to ruošinys automatiškai užtvirtinamas ir prasideda pjovimo apdirbimo procesas. Jau apdirbimo metu robotas paima kitą ruošinį nuo paletės ir pozicionuoja jį lygiavimo stotyje. Sinchronizuotų procesų įgyvendinimas sumažina pagalbinį laiką, padidina suklio veikimo laiką ir leidžia užtikrinti nepertraukiamą procesų seką. Pasibaigus apdirbimui, SherpaLoader®T88 automatiškai suspaustu oru išvalo gatavą detalę prieš ją paimant gatavų detalių griebtuvu. Lygiai taip pat griebtuvas vėl išvalomas prieš užtvirtinant kitą ruošinį.
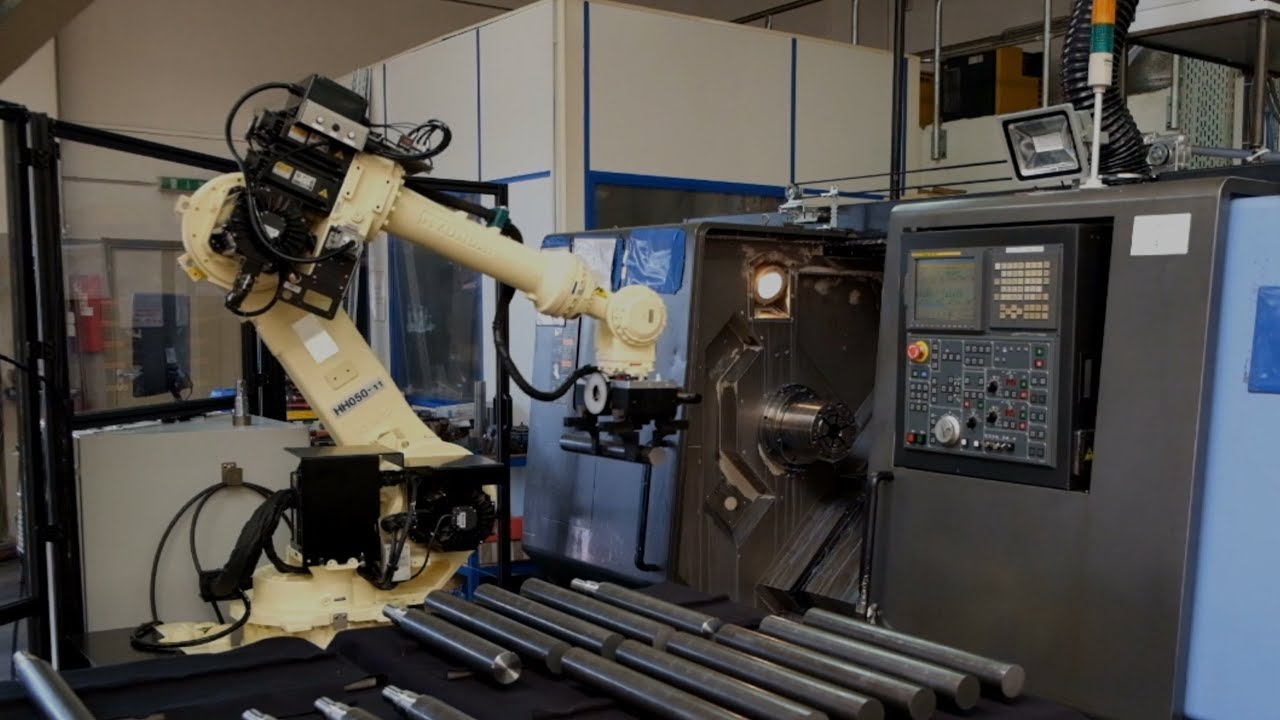
Priekinės ir galinės pusės apdirbimo automatizavimas vienasuklėje DN Solutions Puma GT3100 LM staklėse
Pusfabrikačių padėjimas vyksta dviem etapais, integravus apvertimo stotį. Pirmiausia pusfabrikatis išimamas iš apdirbimo staklių ir padedamas perkėlimo stotyje. Po to robotas paima gatavą detalę iš kitos pusės, apsuka ją ir padeda gatavų detalių paletėje apibrėžtoje padėtyje. Kai tik baigiamas pirmas visų ruošinių apdirbimas, DN Solutions Puma GT3100 LM perderinamas tvirtinimo įtaisas. Galinės pusės apdirbimui gatavų detalių paletė tarnauja kaip medžiagų saugykla detalių galinių pusių apdirbimui. Šis procesas leidžia struktūrizuotą tolesnį apdirbimą ir priekinės bei galinės pusės automatizavimą vienasuklėse staklėse.
Robotizuota CNC serijinė gamyba su integruota sauga DN Solutions Puma GT3100 LM staklėse
Dėl automatizuoto valdymo su kameros pagrindu veikiančiu detalių atpažinimu, mechaniniu išankstiniu lygiavimu ir nuolatiniu griebtuvo valymu susidaro pastovios gamybos sąlygos. Detalių matmenų tikslumas išlieka stabilus, sumažinami nuokrypiai, o broką galima sumažinti. Kartu sumažinamos rankinės operacijos. Taigi automatizuota celė DN Solutions Puma GT3100 LM staklėse palaiko ekonomiškai keičiamo masto serijinę gamybą esant pastoviai kokybei ir aukštam įrenginio prieinamumui. Visada laikomasi aukščiausių saugos standartų. Visas automatizavimo įrenginys aprūpintas pagal saugos reikalavimus veikiančiomis stebėjimo sistemomis. Pakrovimo pusėje yra saugiai stebimos varstomos durys, taip pat ir apdirbimo staklių galinėje pusėje. Papildomai nuolat stebima roboto padėtis ir greitis. SherpaLoader®T88 darbinės zonos durys aprūpintos blokuojamaisiais įtaisais. Šie įtaisai neleidžia operatoriui patekti į darbinę zoną tais momentais, kai robotas griebtuve laiko užtvirtintą detalę, kuri nukritusi galėtų sužaloti žmones.