Integracija automatiziranih postupaka u CNC serijsku proizvodnju
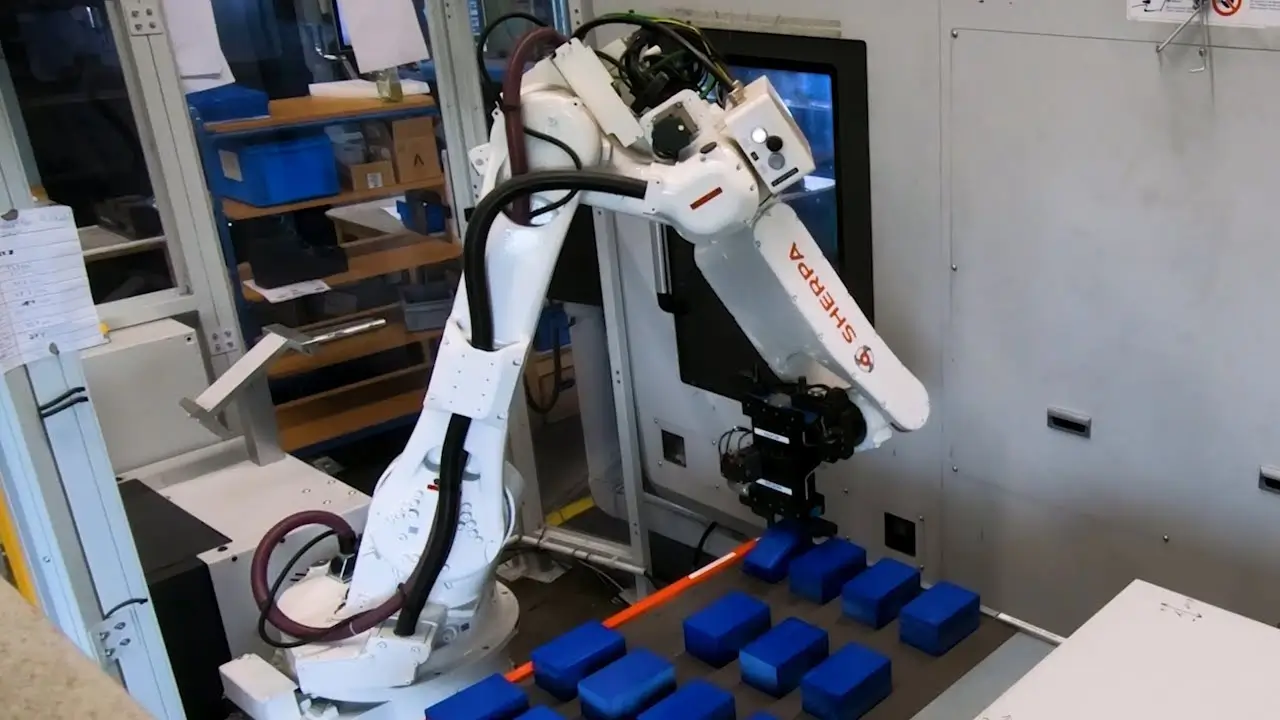
Automatizirano punjenje CNC tokarilica dijelovima omogućuje ujednačenu iskorištenost stroja uz reproducibilne uvjete stezanja. U kombinaciji sa sustavom prepoznavanja vođenim kamerom, automatiziranim čišćenjem stezne glave i mehaničkim predporavnavanjem SherpaLoader®T88 automatizira stabilnu serijsku proizvodnju na stroju DN Solutions Puma GT3100 LM. Proces minimizira ručne zahvate, smanjuje proizvodne varijacije u procesu obrade rezanjem i maksimira vrijeme rada vretena.
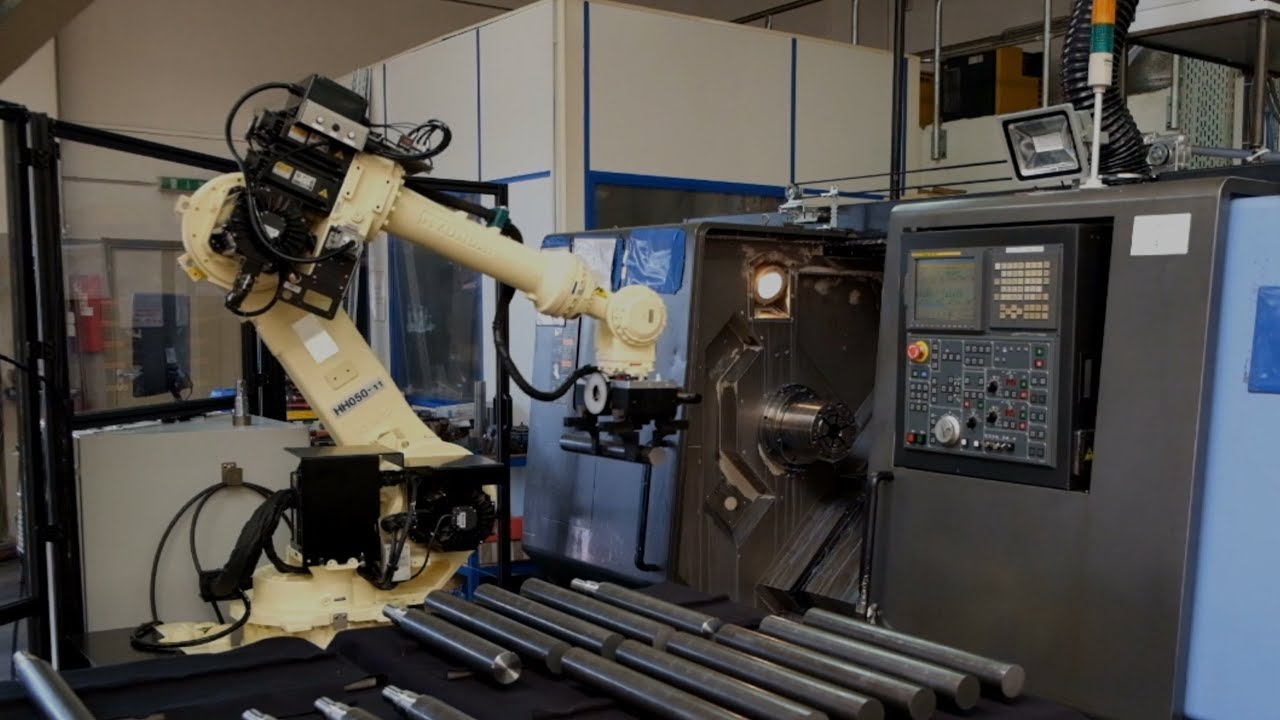
Robotski podržana CNC obrada na stroju DN Solutions Puma GT3100 LM
Tok materijala u ovom procesu obrade rezanjem podijeljen je na paletu sirovih dijelova i paletu gotovih dijelova. Time je moguće sirove dijelove pripremiti u stogovima uz uštedu prostora. SherpaLoader®T88 opremljen je dvama centričnim hvatačima s tri čeljusti kako bi se osigurao siguran transport dijelova. Integriranim sustavom prepoznavanja vođenim kamerom robotska ruka bilježi položaj sirovih dijelova na paleti sirovih dijelova. Time se smanjuju zahtjevi za ručnim punjenjem palete, a proces obrade rezanjem može se uz najmanji napor prilagoditi promjenjivim proizvodnim uvjetima. Vođen prepoznavanjem kamerom, robot uzima prvi sirovi dio hvatačem za sirove dijelove i pozicionira ga na stanicu za poravnavanje. Ovo mehaničko predporavnavanje jamči ponovljivo precizno pozicioniranje i osigurava položaj stezanja dijelova u postrojenju. Nakon poravnavanja sirovi dijelovi prenose se u steznu glavu stroja DN Solutions Puma GT3100 LM. Prije nego što se obradak stegne, robot automatski čisti steznu glavu komprimiranim zrakom. Ova mjera uklanja ostatke strugotina i rashladnog sredstva na steznim površinama i osigurava konstantne uvjete stezanja. Time se jamči konstantna kvaliteta dijelova i smanjuje napor održavanja steznih uređaja. Zatim se sirovi dio automatski steže i počinje proces obrade rezanjem. Već tijekom obrade rezanjem robot uzima sljedeći sirovi dio s palete i pozicionira ga na stanicu za poravnavanje. Implementacija sinkronih procesa smanjuje pomoćna vremena, povećava vrijeme rada vretena i omogućuje kontinuiran slijed procesa. Po završetku obrade SherpaLoader®T88 automatski čisti gotovi dio komprimiranim zrakom prije nego što se uzme hvatačem za gotove dijelove. Jednako tako stezna glava ponovno se čisti prije nego što se stegne sljedeći sirovi dio.
Automatizacija obrade prednje i stražnje strane u jednovretenom stroju DN Solutions Puma GT3100 LM
Odlaganje poluobrađenih dijelova odvija se u dvije faze, uz integraciju stanice za okretanje. Najprije se poluobrađeni dio uzima iz stroja za obradu i odlaže na stanicu za prehvatanje. Zatim robot hvata gotovi dio s druge strane, rotira ga i odlaže na paletu gotovih dijelova u definiranom položaju. Čim se završi prva obrada svih sirovih dijelova, prenamjenjuje se stezna naprava u stroju DN Solutions Puma GT3100 LM. Za obradu stražnje strane paleta gotovih dijelova služi kao skladište materijala za obradu stražnjih strana dijelova. Ovaj postupak omogućuje strukturiranu daljnju obradu i automatizaciju prednje i stražnje strane na jednovretenom stroju.
Robotski podržana CNC serijska proizvodnja s integriranom sigurnošću na stroju DN Solutions Puma GT3100 LM
Automatiziranim rukovanjem s prepoznavanjem dijelova vođenim kamerom, mehaničkim predporavnavanjem i stalnim čišćenjem stezne glave nastaju konstantni proizvodni uvjeti. Dimenzijska točnost dijelova ostaje stabilna, varijacije se smanjuju, a škart se može smanjiti. Istodobno se ručne radnje minimiziraju. Automatizirana ćelija na stroju DN Solutions Puma GT3100 LM tako podupire ekonomski skalabilnu serijsku proizvodnju uz ujednačenu kvalitetu i visoku raspoloživost postrojenja. Pritom se uvijek ispunjavaju najviši sigurnosni standardi. Cijela automatizacijska jedinica opremljena je sigurnosno usmjerenim nadzorima. Na strani punjenja nalaze se sigurno nadzirana krilna vrata, jednako tako i na stražnjoj strani stroja za obradu. Uz to se položaj i brzina robota neprekidno nadziru. Vrata radnog prostora SherpaLoadera®T88 opremljena su napravama za zaključavanje. Naprave sprječavaju ulazak operatera u radni prostor u trenucima kada robot u hvataču drži stegnut dio koji bi pri padu mogao ozlijediti osobe.