機器人輔助切削加工以優化生產流程
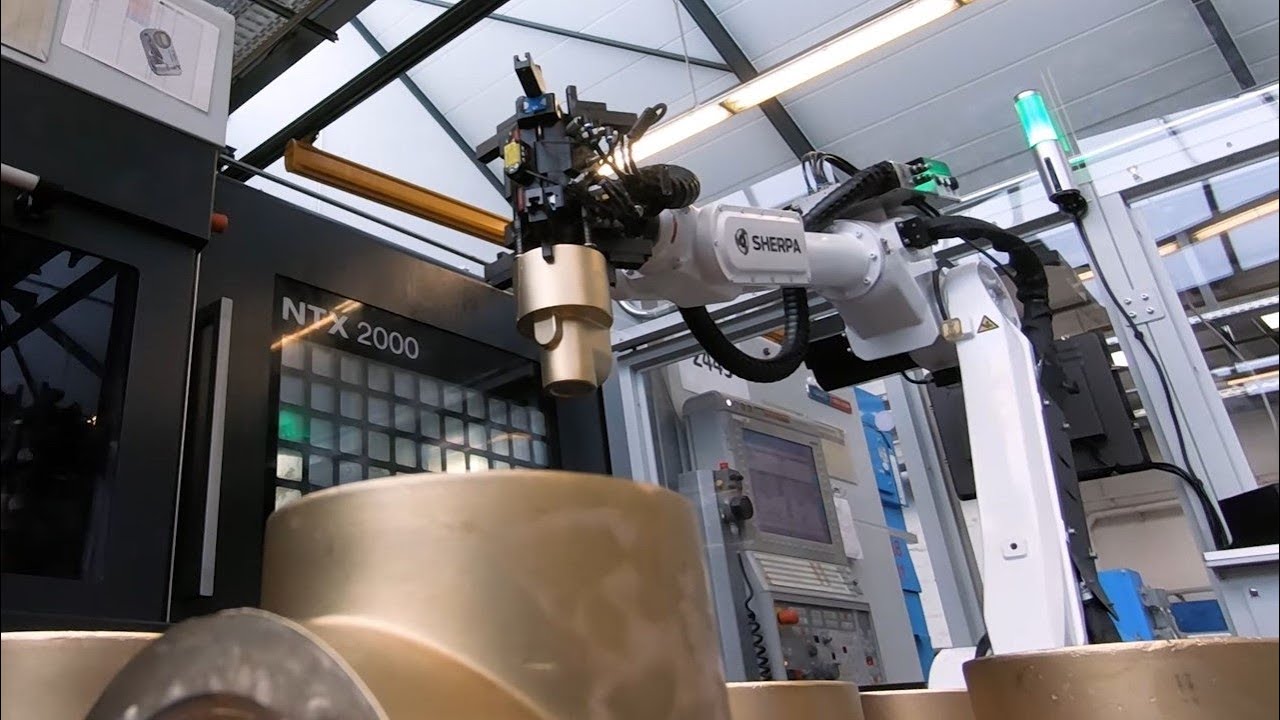
自動化切削加工流程具有提升製程穩定性、減少人工介入以及改善機床利用率的潛力。透過明確的搬運步驟與高重複定位精度的工件供給,可以創造恆定的生產條件。本影片演示了如何透過整合一台 SherpaLoader® M20,將一台 DMG CMX 70 U 的切削加工流程完全自動化。
切削加工自動化DMG CMX 70U
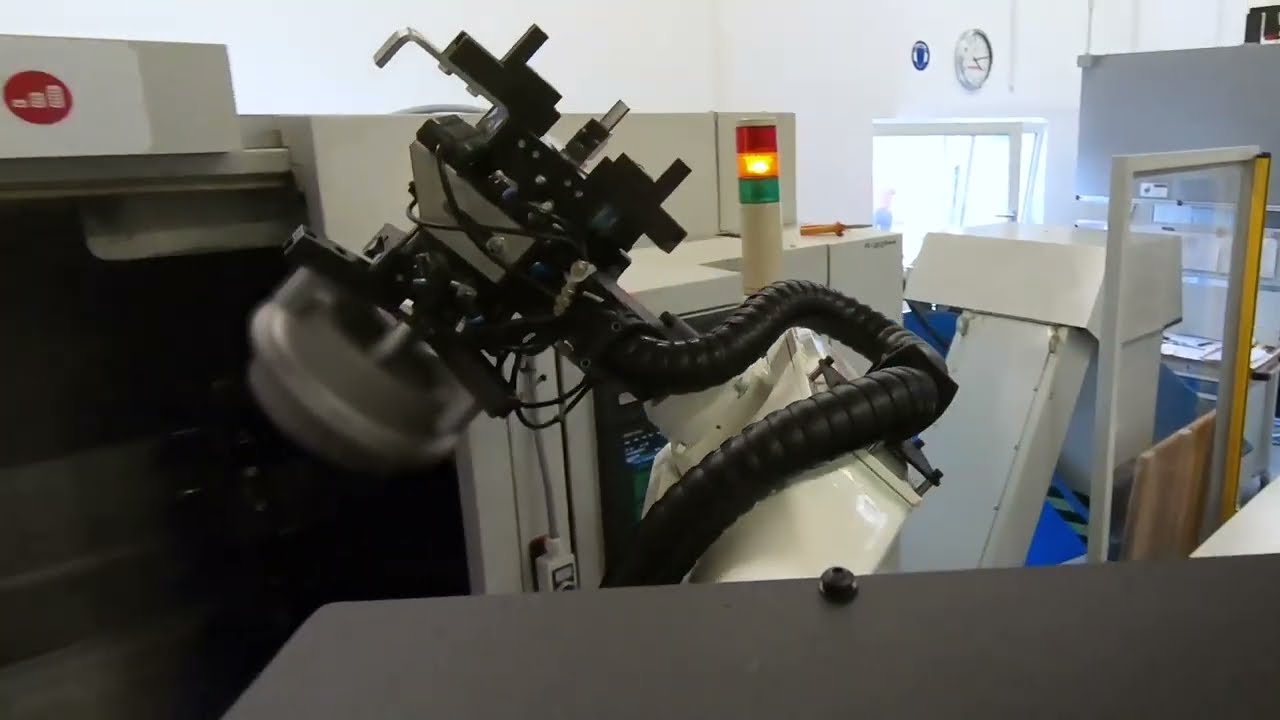
物料準備透過兩台台車進行,毛坯放置在台車上。SherpaLoader® M20 安裝在底座上以優化可及性,配備兩個兩爪平行夾爪,可針對毛坯與成品件的搬運提供不同的調整選項。工件的取放透過攝像頭式識別技術進行,該技術擷取物料準備區上工件的位置與方位。機器手臂將第一個毛坯定位在對齊工位上。在該工位上,毛坯被貼靠在固定擋塊上。這種明確的位置用於為後續在 DMG CMX 70 U 加工中心機的虎鉗中的夾持做準備。自動化的對齊減少了工件位置的變異,並支持加工的可重現性。在夾持之前,會使用壓縮空氣對虎鉗進行自動清潔。機器人借助整合的扭矩扳手自動操作虎鉗。機器人還額外配備了一個致動器,用於可靠地關閉機床室門。隨後,DMG CMX 70 U 上的切削加工流程開始。在此期間,下一個毛坯已在對齊工位上準備就緒。
最大化主軸運行時間透過 SherpaLoader® M20 的同步流程
一旦加工完成,SherpaLoader® M20 借助致動器打開機床室門。已加工完成的工件首先在夾持狀態下使用壓縮空氣清潔。接著,機器人鬆開虎鉗,使用成品件夾爪取出成品件,並再次清潔夾持位置。這可防止切屑與潤滑劑殘留物在夾具中堆積,並有助於夾持條件的恆定。先前準備好的毛坯隨後被放入已清潔的虎鉗中並自動夾持。門再次關閉,下一個加工週期開始。取出的成品件被重新放置到物料存儲上。透過工件搬運與加工的同步流程,輔助時間得以減少。這種做法有助於提升主軸運行時間,並改善加工中心機的經濟利用率。
接觸與運行安全的自動化於 DMG CMX 70 U
工件搬運的完整自動化最小化了人工介入並降低了出錯可能性。同時,加工節拍得以標準化,並確保穩定的工件品質。為了自動化生產單元的安全運行,該設備配備了多項安全導向裝置。其中包括用於防止介入、下方鑽入與上方越界的機械防護裝置、上料側一道用於手部偵測的解析度為 30 mm 的安全監控光柵,以及設備後側一道安全監控的檢修門。此外,機器人的速度與位置持續受到安全監控。這些措施確保在遵守現行安全準則的前提下運行,並在實現高可用性的同時保障安全的生產流程。