Protsessi automatiseerimine Hermle C 20 U ja SherpaLoader® M25-ga
5-teljeliste töötluskeskuste majanduslikul kasutamisel on käsitsi sekkumiste vähendamisel keskne roll. Siin rakendatud lahenduses automatiseerib SherpaLoader® M25 tervikliku toorikute käsitsemise Hermle C 20 U-l. Töövood toorikute ülesvõtmisest kuni valmis detailide äraladumiseni on omavahel kooskõlastatud ja võimaldavad ühtlast detailide etteannet ühtlase kinnituskvaliteediga. Kaamerapõhise detailide tuvastamise, automatiseeritud kinnitusseadmete käsitsemise ja juhitud puhastusjärjestuse kombinatsioon on aluseks stabiilsele robotipõhisele tootmisprotsessile.
Integreeritud ohutusfunktsioonid automaatrežiimi jaoks
Automatiseeritud protsessi ohutuks rakendamiseks on robotrakk varustatud põhjalike kaitseseadmetega. Ohutult jälgitav valguskardin laadimispoolel lahutusvõimega 30 mm takistab inimeste juhuslikku sekkumist ohualasse. Lisaks on tagaküljel jälgitav tiibuks. Koos roboti asendi ja kiiruse pideva võrdlemisega tagatakse alati inimohutu käitamine ning sekkumine, alt läbi pugemine või ülemäära ulatumine käitamise ajal on ohutult välistatud. Kaitseseadmed võimaldavad katkematut ja usaldusväärselt kaitstud töövoogu.
Robotipõhine CNC lõiketöötlus Hermle C 20 U-l
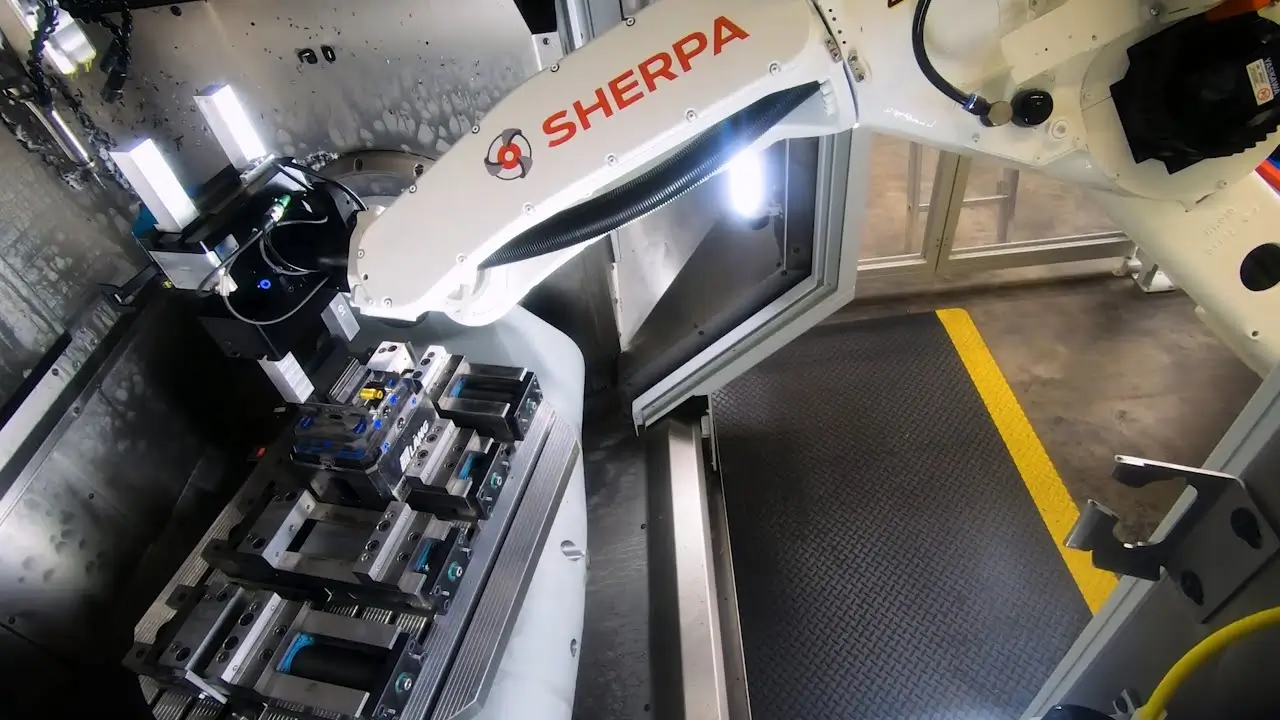
Materjali ettevalmistamine toimub SpaceBoxi kaudu. Robot avab selle automatiseeritult robotihaaratsil oleva väljatõmbekonksu abil. Seejärel tuvastab kaamerapõhine tuvastussüsteem toorikute asendid materjali laos, nii et SherpaLoader® M25 saab toorikuid ohutult ja asendile vastavalt haarata. Toorikute automaatne tuvastamine vähendab nõudeid materjali lao käsitsi varustamisele ja võimaldab automatiseerimist hõlpsasti kohandada muutuvatele toorikugeomeetriatele ja tootmistingimustele. Robotikäsi on varustatud kahe kaheloualise paralleelhaaratsiga. See haarab esimese tooriku toorikuhaaratsiga ja positsioneerib selle joondamisjaamas vastu mehaanilist piiret. Määratud eeljoondamine vähendab kinnitusvigu, kindlustab korduvtäpse kinnitamise masina kruustangidesse ja toetab töötlemiskvaliteedi korratavust. Pärast tooriku automatiseeritud joondamist viib SherpaLoader® M25 selle Hermle C 20 U tööruumi. Enne detaili sissepanekut puhastatakse kruustangid automaatselt, et eemaldada laastude või jahutus-määrdeaine jäägid. Nii paranevad kinnitustingimused, väheneb kinnitustehnika kulumine ja välditakse võimalikke häireid töötlemisprotsessis. Seejärel paneb robot tooriku masinkruustangidesse. SherpaLoader® M25-l on integreeritud momentvõti, millega robot saab mehaanilised kruustangid sulgeda määratud pöördemomendi ja pöördenurgaga. Lõiketöötluse ajal valmistatakse põhiajaga paralleelselt juba ette järgmine toorik. Sünkroonsete töövoogude rakendamine vähendab masina seisakuid ja võimaldab spindli tööaja maksimeerimist. Pärast lõiketöötlusprotsessi puhastab robotikäsi valmis detaili, et eemaldada külgekleepunud laastud või jahutus-määrdeaine. Seejärel avab SherpaLoader® M25 kruustangid momentvõtmega ja võtab valmis detaili välja valmisdetaili haaratsiga. Kruustangid puhastatakse uuesti automaatselt, enne kui järgmine toorik sisse pannakse ja kinnitatakse. Valmis detailid asetatakse tagasi materjali lattu. Standarditud puhastamine ja üleandmine toetab ühtlast töötlemiskvaliteeti ja lihtsustab masina hooldust.
Tõhus automatiseerimine Hermle C 20 U-l SherpaLoader® M25-ga
Automatiseeritud üleandmine Hermle C 20 U-l SherpaLoader® M25 abil loob korratavad tingimused kogu lõiketöötlusprotsessile. Määratud toorikute tuvastamise, täpse eeljoondamise ja automatiseeritud kruustangide käsitsemise kombinatsioon võimaldab vähendada käsitsi sekkumiste mõju. Robotipõhine CNC töötlemine kulgeb seega ühtlaste kinnitus- ja üleandmistingimuste juures, mille tõttu paraneb detailide mõõtmetäpsus ja praagimäär väheneb. Samal ajal võimaldab automatiseerimine masina pidevat koormust minimaalse tööjõukuluga. See suurendab seeriatootmise tõhusust ja toetab olemasolevate ressursside majanduslikult planeeritavat kasutamist.