Automatização de processos com a Hermle C 20 U e o SherpaLoader® M25
Para a utilização económica de centros de maquinagem de 5 eixos, a redução das intervenções manuais desempenha um papel central. Na solução aqui implementada, o SherpaLoader® M25 automatiza um manuseamento contínuo das peças numa Hermle C 20 U. Os fluxos, desde a recolha da peça em bruto até à colocação da peça acabada, estão coordenados entre si e permitem uma alimentação uniforme das peças, com qualidade de fixação constante. A combinação de reconhecimento de peças por câmara, comando automatizado do dispositivo de fixação e uma sequência de limpeza controlada constitui a base de um processo de fabrico estável e assistido por robô.
Funções de segurança integradas para o funcionamento automático
Para a implementação segura do processo automatizado, a célula robótica está equipada com dispositivos de proteção abrangentes. Uma cortina de luz de verificação segura no lado de carregamento, com uma resolução de 30 mm, impede a intromissão acidental de pessoas na zona de segurança. A isto acresce uma porta de batente monitorizada na parte de trás. Em combinação com uma verificação contínua da posição e da velocidade do robô, garante-se sempre um funcionamento seguro para as pessoas e impedem-se de forma segura a intromissão, a passagem por baixo ou o alcance por cima durante o funcionamento. Os dispositivos de segurança permitem um fluxo ininterrupto e protegido de forma fiável.
Maquinagem CNC assistida por robô numa Hermle C 20 U
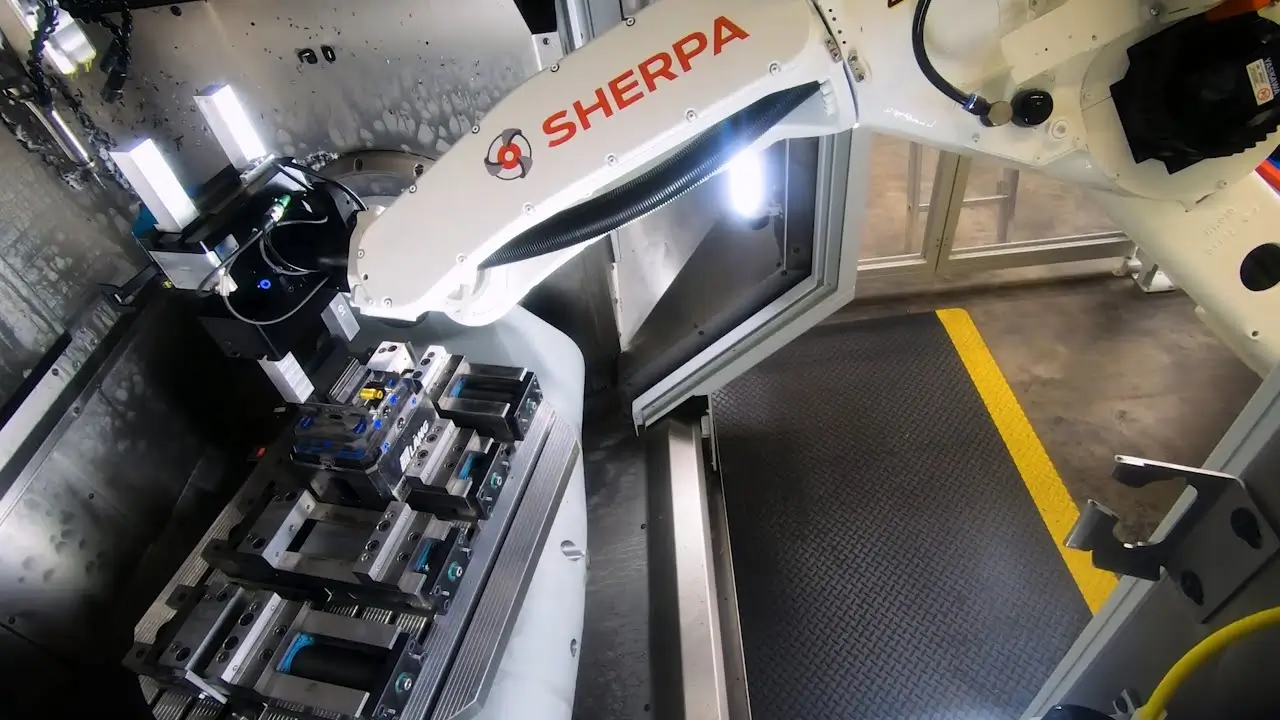
A preparação de material é feita através de uma SpaceBox. Esta é aberta de forma automatizada pelo robô, através de um gancho de extração na garra do robô. Um sistema de reconhecimento por câmara deteta em seguida as posições das peças em bruto no armazém de material, de modo a permitir uma preensão segura e na posição correta pelo SherpaLoader® M25. A deteção automática das peças em bruto reduz as exigências quanto ao carregamento manual do armazém de material e permite uma adaptação simples da automatização a geometrias de peça e condições de fabrico variáveis. O braço do robô está equipado com duas garras paralelas de duas garras. Agarra a primeira peça em bruto com a garra para peças em bruto e posiciona-a numa estação de alinhamento contra um batente mecânico. O pré-alinhamento definido reduz os erros de fixação, assegura uma fixação com elevada repetibilidade no torno de máquina e apoia a reprodutibilidade da qualidade de maquinagem. Após o alinhamento automatizado da peça em bruto, o SherpaLoader® M25 transfere-a para o espaço de trabalho da Hermle C 20 U. Antes da inserção da peça, é feita uma limpeza automática do torno de máquina, para remover resíduos de aparas ou de fluido de corte. Desta forma, melhoram-se as condições de fixação, reduz-se o desgaste na técnica de fixação e evitam-se potenciais avarias no processo de maquinagem. Em seguida, o robô insere a peça em bruto no torno de máquina. O SherpaLoader® M25 dispõe de uma aparafusadora dinamométrica integrada, com a qual o robô consegue fechar o torno de máquina mecânico com um binário e um ângulo de rotação definidos. Durante a maquinagem, a peça em bruto seguinte é já preparada em tempo mascarado. A implementação de fluxos sincronizados reduz as paragens da máquina e permite uma maximização do tempo de funcionamento do fuso. Após o processo de maquinagem, o braço do robô limpa a peça acabada, para remover aderências como aparas ou fluido de corte. Em seguida, o SherpaLoader® M25 abre o torno de máquina com a aparafusadora dinamométrica e retira a peça acabada com a garra para peças acabadas. O torno de máquina é novamente limpo de forma automática antes de a peça em bruto seguinte ser inserida e fixada. As peças acabadas são novamente colocadas no armazém de material. Graças à limpeza e à transferência padronizadas, apoia-se uma qualidade de maquinagem constante e simplifica-se a manutenção da máquina.
Automatização eficiente da Hermle C 20 U com o SherpaLoader® M25
A transferência automatizada na Hermle C 20 U pelo SherpaLoader® M25 cria condições reproduzíveis para todo o processo de maquinagem. Através da combinação de deteção definida de peças, pré-alinhamento preciso e comando automatizado do torno de máquina, é possível reduzir as influências das intervenções manuais. A maquinagem CNC assistida por robô decorre, assim, em condições constantes de fixação e de transferência, melhorando-se a precisão dimensional das peças e minimizando-se a taxa de refugo. Ao mesmo tempo, a automatização permite uma utilização contínua da máquina com um esforço mínimo de pessoal. Isto aumenta a eficiência no fabrico em série e apoia uma utilização economicamente planeável dos recursos existentes.